Estrutura da Rede CAN Automotiva
Entendendo o problema
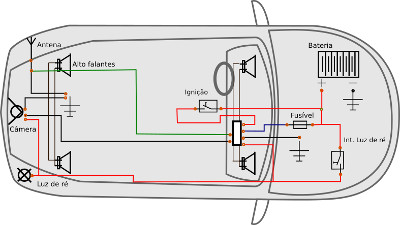
de ré Modo convencional
Imagine a seguinte situação: instalar um rádio e uma câmera de ré em um veículo. Fazendo isso no modo convencional, para instalar o rádio, temos que alojá-lo no painel do veículo, fazer com que a alimentação seja fornecida somente se a ignição for ligada, estender os fios para os alto-falantes e colocar uma antena (1). Similarmente, para instalar a câmera de ré temos que escolher um local apropriado na parte traseira do veículo para alojá-la, passar a fiação de alimentação por algum ponto de fornecimento de energia, interromper o sinal através do interruptor da luz de ré da caixa de marchas e passar a fiação do sinal de vídeo de forma que chegue até o painel do veículo, onde será acoplado à uma tela (2).
Para obtermos os sinais provenientes da chave de ignição e do interruptor da luz de ré da transmissão, temos que fazer com que esses cabos passem por esses circuitos específicos, compartilhando o sinal do chaveamento. Além disso, todo o cabeamento necessário à transmissão do som, sinal de antena e vídeo são distintos, sendo estendidos ao longo do chassi do veículo conforme a necessidade. Se mais tarde decidirmos instalar mais uma câmera, por exemplo, todo o trabalho de cabeamento e chaveamento terá que ser repetido.
CAN como solução para o problema
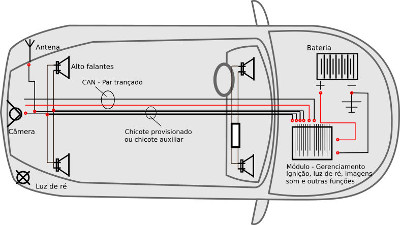
A execução do mesmo serviço empregando um sistema de informações compartilhada, evita que tenhamos que recorrer ao chaveamento repetitivo à cada novo dispositivo instalado. Em consequência, teremos economia de cabeamento pelo provisionamento de conexões através do chicote principal ou através de chicotes especiais fornecidos junto com o módulo do subsistema (3), no nosso exemplo, informações e entretenimento, como mostrado na figura 2.
Módulos de Controle ou ECUS
transmissão automatizada em Rede CAN
Módulos ou ECU’s, do inglês Electronic Control Unit, são pequenos computadores especializados no gerenciamento de seu subsistema. Esses componentes processam informações disponíveis, comandando seus atuadores que irão se adequar à cada situação (4).
Para tornar a solução idealizada através da CAN possível, todos os subsistemas em um veículo, ou ao menos os subsistemas principais, necessitam estar preparados para operar via informação distribuída. Significa que seus módulos de controle devem não apenas cumprir as funções básicas como ler, interpretar e ajustar seu subsistema, como também compartilhar informações através da rede (5).
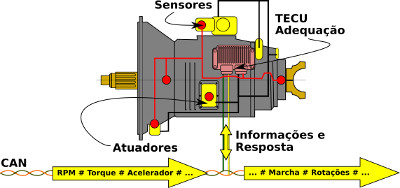
Tomando a transmissão automatizada (6) como exemplo, a TECU (Transmission Electronic Control Unit) recebe em intervalos de tempo bastante curtos, informações da rede a respeito da rotação do motor, seu torque e posição do acelerador, enquanto sensores internos permitem calcular qual marcha está engatada. Como resposta a esse comjunto de informações, aciona seus atuadores para, por exemplo, abrir a embreagem, solicitar a aceleração do motor para sincronizar as engrenagens, engatar uma marcha mais reduzida e acoplar a embreagem novamente.
Durante esse procedimento, cada etapa do processo será verificada dando ou não prosseguimento ao mesmo. As informações geradas pela TECU são transmitidas à rede para serem utilizadas por outras ECU’s em tempo real.
Compartilhamento de sinais
Em uma rede CAN todos os módulos podem transmitir, processar e enviar dados, não existe um computador central responsável pelo gerenciamento da rede, todos os módulos possuem a mesma prioridade e a importância da mensagem transmitida por qualquer módulo é definida em função de seu conteúdo. Isso permite a implementação da rede na forma de barramento.
Podemos conceituar barramento a partir de uma instalação elétrica de onde saem várias lâmpadas em paralelo:
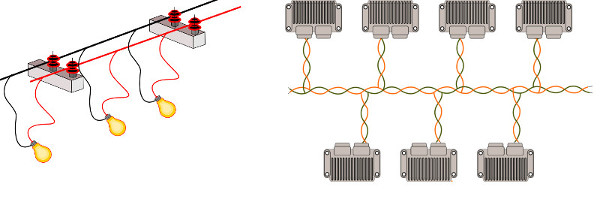
A grosso modo, eletricamente falando, cada uma das lâmpadas representa a ligação de um módulo na rede CAN, a diferença fundamental é que, enquanto as lâmpadas recebem corrente alternada com frequência constante, na CAN a corrente é contínua, com baixa voltagem, obedecendo a frequências que variam em função da informação transmitida. A tensão de alimentação é distribuida pelo chicote principal, porém por outros dois cabos.
Componentes
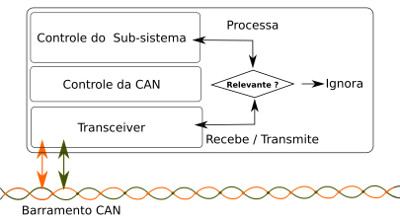
Uma ECU deve estar subdividida em três blocos principais:
- Controle do Sub-sistema;
- Controle da CAN;
- Transceiver.
O Transceiver é a ponte entre o cabeamento da rede e o módulo, lendo os dados circulantes, passando-os ao controle da CAN. Como todo módulo conectado à rede recebe todas as mensagens circulantes, o Controle da CAN verifica se a mensagem é ou não relevante à sua função. Se for, irá processá-la passando-a para o Controle do Subsistema, e se não for irá ignorá-la. No caminho inverso, as informações do subsistema são lidas pelo Controle da CAN e disponibilizadas na rede através do Transceiver.
componentes principais e funções
As informações são processadas pelas ECU’s em formato binário e disponibilizadas através do Controle da CAN para o Transceiver. Este converte os dados binários em corrente elétrica para passá-los através do cabeamento da rede. No sentido inverso, o Transceiver recebe os sinais elétricos e os converte em código binário para enviá-los ao Controle da CAN.
A intensidade dos sinais elétricos presentes na transmissão de dados pode sofrer alterações em função de ruídos gerados pelo cabeamento da rede. Um dos fatores que influenciam a qualidade da transmissão é a presença de ruídos gerados pela voltagem e corrente no cabeamento que, por ser curto, não consegue dissipar totalmente o sinal que, ao atingir os extremos do cabeamento acaba retornando, causando problemas na transmissão. Teoricamente, se o cabo fosse infinito não haveria retorno, deste modo são calculados resistores equivalentes que conseguem dissipar toda a diferença de potencial. Esses resistores, normalmente de 120 ohms, são instalados nas extermidades da rede, nos chicotes dos módulos principais, eliminando esse problema.
Legislação
A partir de 1991 (5) nos Estados Unidos, começaram a surgir leis que obrigam às montadoras, fornecerem um meio de verificação do status do veículo quanto à emissão de poluentes, disponibilizando alguma forma para acoplamento de um dispositivo externo, como um computador, para verificar o estado de cada um dos sensores relativos a emissões. Em 1996 o conector OBDII foi padronizado tendo sua presença obrigatória desde então. No Brasil essa obrigatoriedade ocorreu em 2010. Esse conector deve também permitir o acesso à leitura dos dados das ECU’s relativos ao seu funcionamento, tornando a manutenção do sistema simplificada e deve ficar no interior da cabine, em um raio de 0,61 cm a partir do centro do volante, para ser alcançado com facilidade.
Referências
- (1) Instalação de Som Automotivo MULTILASER - SOM AUTOMOTIVO – Esquema de Ligação
- (2) Instalação de Câmera de ré MULTILASER – INSTALAÇÃO DE CÂMERA DE RÉ
- (3) BOSCH CAN Specification Version 2 1-Introduction Part A – page 4
- (4) Wikipedia Electronic control unit
- (5) SAE J1979 - APR2002 Revised by the SAE Vehicle Electrical and Electronics Diagnostic System Standards Committee and… April 2002”.
- (6) Transmissões Automatizadas Sixsigmatas – Transmissões Automatizadas
-
(7) Self-Study 238 and 269
ssp238 Data Exchange on CAN bus I
ssp269 Data Transfer on CAN bus II
Proximos Artigos da Série:
-
Como funciona a rede CAN Automotiva
-
Protocolos das Redes CAN
-
Diagnósticos nas Redes CAN
Postagens
Posts
Flexbox Model-Tutorial Parte 7Com este artigo encerramos essa série, mostrando a utilização do flex-box model.
Flexbox Model-Tutorial Parte 6
Com a implementação da barra de navegação no sexto artigo desta série, terminamos a elaboração dos menus responsivos.
Flexbox Model-Tutorial Parte 5
Continuando com nosso tutorial, veremos como incorporar o menu 'drop-down' ao menu hamburguer.
Flexbox Model-Tutorial Parte 4
Na quarta parte deste tutorial, mostramos como criar os menus responsivos de três modos diferentes: hamburguer; ícones com texto e texto explícito e como ativá-los através das 'Media queries'. Neste artigo abordamos a implementação do menu tipo ‘Hamburguer’.
Flexbox Model-Tutorial Parte 3
Na terceira parte deste tutorial, mostramos como organizar os arquivos para upload para um servidor, utilizar fontes da Google e os ícones Awesome.
Flexbox Model-Tutorial Parte 2
Na segunda parte deste tutorial, mostramos como identificar os elementos visuais de uma página web, definir os comportamentos desejados e estrutura-los em HTML, preparando para estilização e codificação do conteúdo.
Flexbox Model-Tutorial
Neste artigo vamos explorar a construção de uma página responsiva utilizando apenas linguagens padrão, através do layout flexível, ou ‘Flexbox Model’ introduzido com o CSS3. Aprenda como utilizar esse modelo para economizar tempo de manutenção e estar em conformidade com as normas para layout flexível.
ELM327 e OBD2
O que é preciso saber!
Se você é um entusiasta do automobilismo, hobista ou curte ‘gadgets’, com certeza ouviu falar do padrão OBD2 e dos adaptadores ELM327, que abrem um leque de opções para quem deseja ter controle total sobre o seu veículo, ou quem sabe, transformar um tablet ou smartfone em um painel personalizado.
Como a CAN Funciona
Um dos motivos de sucesso da CAN Automotiva é a sua robustez. Essa robustez se deve à uma solução simples dada pela BOSCH: transportar os dados em par trançado, com diferencial de voltagem alto o suficiente para ser imune aos ruídos produzidos em um veículo...
ARTIGO
Estrutura da CAN
"A complexidade de um sistema automotivo atualmente é gigantesca. A cada dia novas funções são incorporadas aumentando ainda mais essa complexidade. Neste artigo mostramos como é a estrutura física de uma rede CAN, quais são os seus componentes, como se interconectam, tornando possível a manutenção."
ARTIGO
Rede CAN Automotiva
A rede automotiva CAN, “Controler Area Network”, é a responsável pela integração entre os módulos eletrônicos instalados no veículo. É através desta rede que circulam mensagens, comandos e códigos que tornam os veículos cada vez mais seguros e fáceis de dirigir possibilitando, também, a manutenção assistida por computador. Entenda como essa rede opera e como interagir com a mesma...
ARTIGO
Transmissões Automatizadas
As transmissões automatizadas são a nova tendência do mercado de transporte rodoviário e tudo indica que não é apenas modismo...
ARTIGO
ServiceRanger4
O ServiceRanger4 é uma ferramenta para diagnóstico de veículos que possuam produtos Eaton comandados eletronicamente, como as transmissões automatizadas...
DOWNLOAD
Capacitación en SR4
Capacitación y Traducción de parámetros SR4 - Presentación en Power Point, a descripción de los parámetros configurables y una explicación sobre cómo hacer la certificación del tacógrafo en los camiones Ford Kolector.
DOWNLOAD
Treinamento no SR4
Treinamento e Tradução dos parâmetros - Apresentação em Power Point com a descrição dos parâmetros configuráveis e explicação de como fazer a aferição dos tacógrafos nos veículos Ford Kolector.